


Инкрементальные энкодеры SICK

Отличная концентричность и исключительная надежность достигаются благодаря большому расстоянию между подшипниками, несущими вал энкодера. Электрическая изоляция между валом двигателя и энкодером со сквозным валом является особенностью, которая существенно повышает помехоустойчивость и надежность. Поэтому энкодеры могут использоваться в жестких рабочих условиях в любой отрасли промышленности.
Энкодер Sick DBS36E-BBAP02500
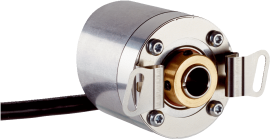
Энкодер SICK DBS36E-BBAP02500 точно замеряет угол перемещения объекта и преобразует в электрический импульс. Имеет полый глухой вал диаметром 8 мм. В основе работы датчика находится инкрементальный принцип. Электрическое соединение выполняется через фланцевый разъем, тип — универсальное. Технические характеристики: питание — 4,5-5,5 dc; формат выходных сигналов — ttl / rs-422.
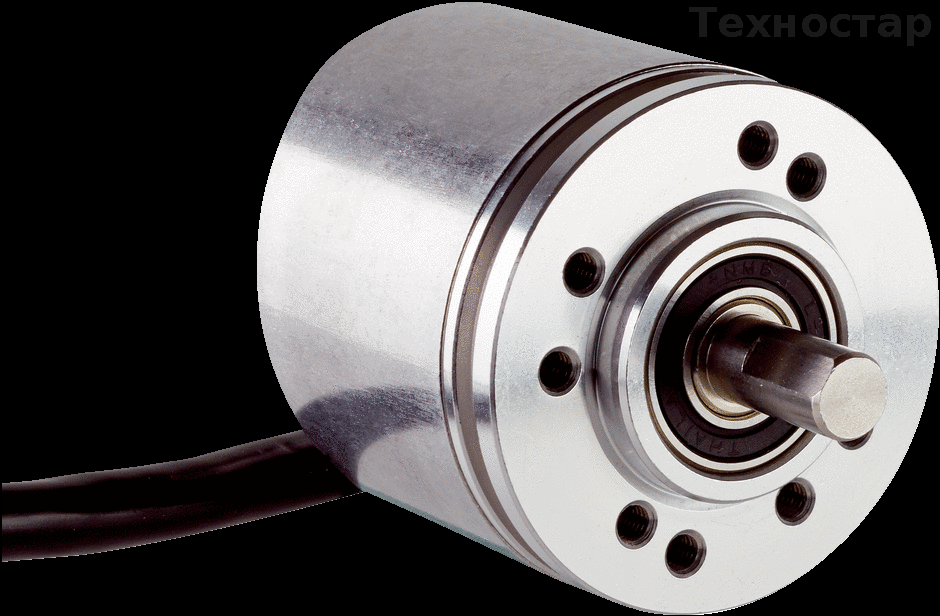
Энкодер Sick DBS36E-S3EJ02000
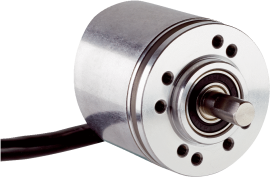
Энкодер SICK DBS36E-S3EJ02000 точно замеряет угол перемещения объекта и преобразует в электрический импульс. Имеет сплошной вал диаметром 6 мм. В основе работы датчика находится инкрементальный принцип. Для соединения с двигателем используется прижимной. Электрическое соединение выполняется через фланцевый разъем, тип — универсальное. Технические характеристики: питание — 7-30 dc; формат выходных сигналов — htl / push pull.
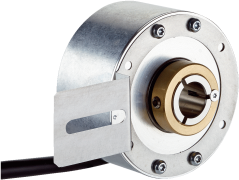
Энкодер Sick DBS36E-S3EK01000
Энкодер SICK DBS36E-S3EK01000 точно замеряет угол перемещения объекта и преобразует в электрический импульс. Имеет сплошной вал диаметром 6 мм. Преимущества серии Торцевой фланец с сервопазом позволяет выполнять монтаж с помощью сервоклемм. Универсальная монтажная пластина энкодера DBS36 Core позволяет осуществлять быструю замену устройств без внесения каких-либо изменений в установку. Широкий диапазон метрических и дюймовых размеров вала позволяет использовать энкодеры по всему миру. Универсальный кабельный вывод позволяет применять энкодеры в труднодоступных местах и выполнять гибкую прокладку кабелей. Долговечность и надежность в работе благодаря высокому классу защиты корпуса, температурной стойкости и большому ресурсу подшипников. Торцевой фланец с различными монтажными шаблонами отверстий обеспечивает высокую степень гибкости при монтаже как на уже установленном так и новом оборудовании. Высокая адаптивность механического интерфейса энкодеров и доступные сопутствующие аксессуары позволяют применять энкодеры одного типа на различных установках и оборудовании.
Энкодер Sick DBS36E-S3EM01000
В основе работы датчика находится инкрементальный принцип. Для соединения с двигателем используется прижимной. Электрическое соединение выполняется через фланцевый разъем, тип — универсальное. Технические характеристики: питание — 7-30 dc; формат выходных сигналов — htl / push pull.
Энкодер Sick DBS60E-BHFC03600
Энкодер SICK DBS36E-BBAM02048 точно замеряет угол перемещения объекта и преобразует в электрический импульс. Имеет полый глухой вал диаметром 8 мм. В основе работы датчика находится инкрементальный принцип. Электрическое соединение выполняется через фланцевый разъем, тип — универсальное. Технические характеристики: питание — 4,5-5,5 dc; формат выходных сигналов — ttl / rs-422.
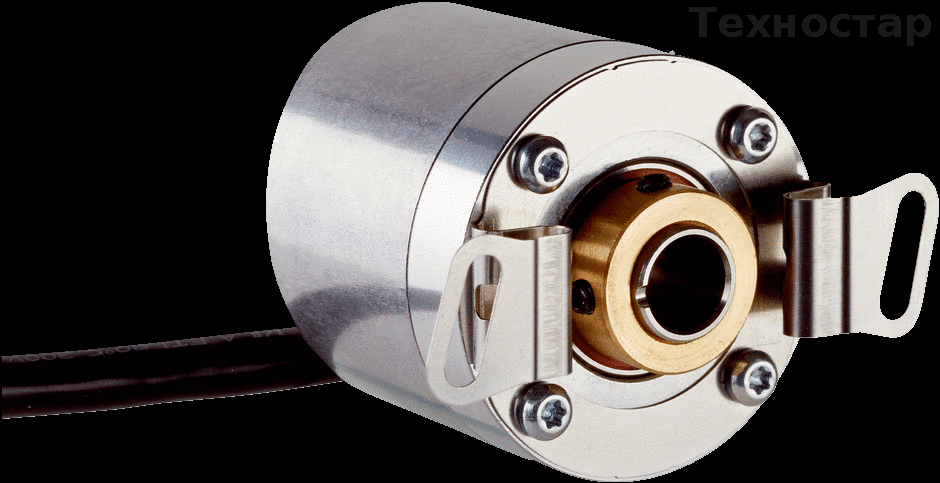
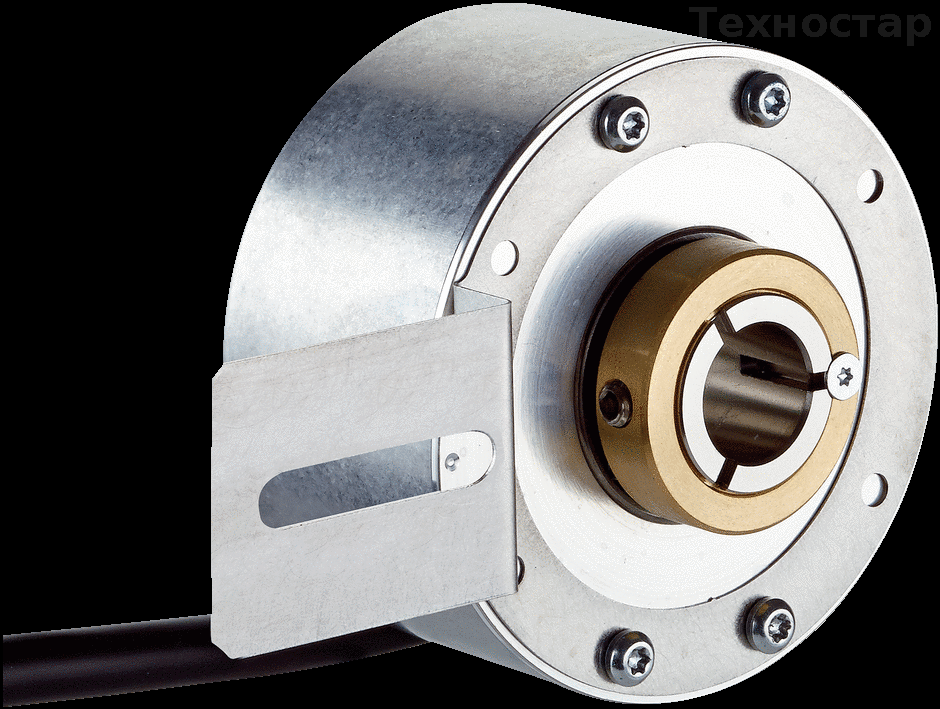
Энкодер Sick DBS60E-THAJD1024
Энкодер SICK DBS60E-THAJD1024 точно замеряет угол перемещения объекта и преобразует в электрический импульс. Имеет полый сквозной вал диаметром 15 мм. В основе работы датчика находится инкрементальный принцип. Электрическое соединение выполняется через фланцевый разъем, тип — универсальное. Технические характеристики: питание — 4,5-5,5 dc; формат выходных сигналов — ttl / rs-422.
Энкодер Sick DBS36E-BBAP02500
Энкодер SICK DBS36E-BBAP02500 точно замеряет угол перемещения объекта и преобразует в электрический импульс. Имеет полый глухой вал диаметром 8 мм. В основе работы датчика находится инкрементальный принцип. Электрическое соединение выполняется через фланцевый разъем, тип — универсальное. Технические характеристики: питание — 4,5-5,5 dc; формат выходных сигналов — ttl / rs-422.
Энкодер Sick DBS36E-S3EJ02000
Энкодер SICK DBS36E-S3EJ02000 точно замеряет угол перемещения объекта и преобразует в электрический импульс. Имеет сплошной вал диаметром 6 мм. В основе работы датчика находится инкрементальный принцип. Для соединения с двигателем используется прижимной. Электрическое соединение выполняется через фланцевый разъем, тип — универсальное. Технические характеристики: питание — 7-30 dc; формат выходных сигналов — htl / push pull.
Энкодер Sick DBS36E-S3EK01000
Энкодер SICK DBS36E-S3EK01000 точно замеряет угол перемещения объекта и преобразует в электрический импульс. Имеет сплошной вал диаметром 6 мм. Преимущества серии Торцевой фланец с сервопазом позволяет выполнять монтаж с помощью сервоклемм. Универсальная монтажная пластина энкодера DBS36 Core позволяет осуществлять быструю замену устройств без внесения каких-либо изменений в установку. Широкий диапазон метрических и дюймовых размеров вала позволяет использовать энкодеры по всему миру. Универсальный кабельный вывод позволяет применять энкодеры в труднодоступных местах и выполнять гибкую прокладку кабелей. Долговечность и надежность в работе благодаря высокому классу защиты корпуса, температурной стойкости и большому ресурсу подшипников. Торцевой фланец с различными монтажными шаблонами отверстий обеспечивает высокую степень гибкости при монтаже как на уже установленном так и новом оборудовании. Высокая адаптивность механического интерфейса энкодеров и доступные сопутствующие аксессуары позволяют применять энкодеры одного типа на различных установках и оборудовании.
Энкодер Sick DBS36E-S3EM01000
В основе работы датчика находится инкрементальный принцип. Для соединения с двигателем используется прижимной. Электрическое соединение выполняется через фланцевый разъем, тип — универсальное. Технические характеристики: питание — 7-30 dc; формат выходных сигналов — htl / push pull.
Энкодер Sick DBS60E-BHFC03600
Энкодер SICK DBS36E-BBAM02048 точно замеряет угол перемещения объекта и преобразует в электрический импульс. Имеет полый глухой вал диаметром 8 мм. В основе работы датчика находится инкрементальный принцип. Электрическое соединение выполняется через фланцевый разъем, тип — универсальное. Технические характеристики: питание — 4,5-5,5 dc; формат выходных сигналов — ttl / rs-422.
Энкодер Sick DBS60E-THAJD1024
Энкодер SICK DBS60E-THAJD1024 точно замеряет угол перемещения объекта и преобразует в электрический импульс. Имеет полый сквозной вал диаметром 15 мм. В основе работы датчика находится инкрементальный принцип. Электрическое соединение выполняется через фланцевый разъем, тип — универсальное. Технические характеристики: питание — 4,5-5,5 dc; формат выходных сигналов — ttl / rs-422.